在ROS(Robot Operating System)环境中,通过配置VPN连接,可轻松实现远程访问和高效的数据传输。这一设置简化了远程操作与数据同步,提高了研发和运维的便捷性。
ROS(机器人操作系统,Robot Operating System),是一款以Linux为基础的机器人中间件,它广泛应用于机器人研究、开发以及教学等多个领域,在ROS项目中,远程访问和数据传输是至关重要的环节,本文将详细介绍如何在ROS环境中配置VPN连接,以实现远程访问和数据传输的功能。
VPN简介

VPN(虚拟专用网络,Virtual Private Network),是一种通过公共网络构建专用网络的技术,它为用户提供安全的远程访问服务,确保数据传输的安全性,在ROS环境中,配置VPN连接能够帮助我们远程访问机器人实验平台,实时获取数据并进行处理。
VPN配置步骤
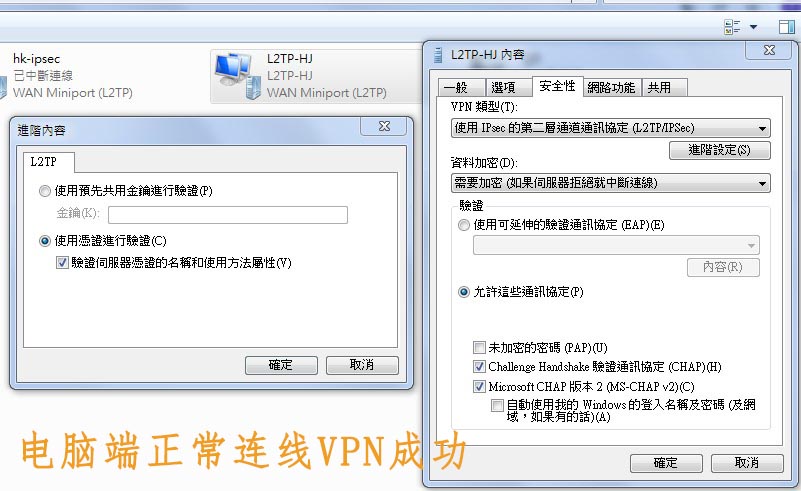
1. 选择VPN类型
目前市场上常见的VPN类型有PPTP、L2TP/IPsec和OpenVPN等,根据实际需求选择合适的VPN类型,本文以OpenVPN为例进行介绍。
2. 下载并安装OpenVPN客户端
登录OpenVPN官方网站(https://openvpn.com/tags-2521.html" class="superseo">vpn.net/),下载适用于您操作系统的OpenVPN客户端,下载完成后,按照提示进行安装。
3. 下载VPN配置文件
登录您的VPN服务提供商网站,下载VPN服务器配置文件,配置文件通常以.ovpn格式保存。
4. 导入VPN配置文件
打开OpenVPN客户端,点击“导入配置文件”按钮,选择下载的VPN配置文件,导入成功后,在客户端界面上会出现相应的VPN连接。
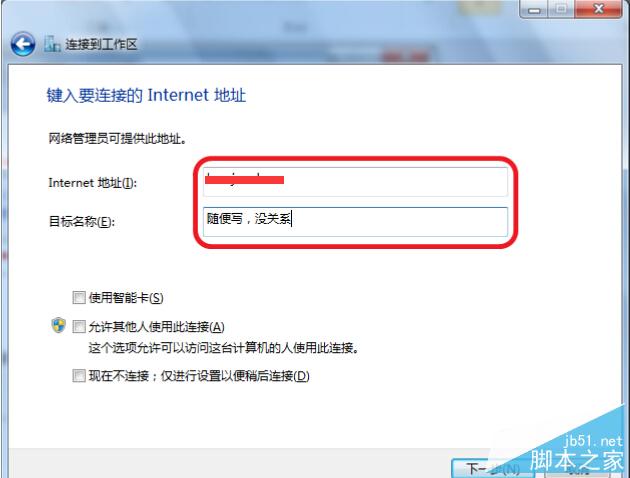
5. 连接VPN
点击“连接”按钮,输入VPN账号和密码,即可连接到VPN服务器,连接成功后,您可以通过VPN实现远程访问。
ROS环境下的VPN配置
1. 设置网络参数
在ROS环境下,需要设置网络参数以实现远程访问,以下是在roscore中设置网络参数的示例:
roscore
rosparam set /master uri http://<master_ip>:11311
rosparam set /master hostname <master_ip>
<master_ip>为VPN服务器所在主机的IP地址。
2. 修改机器人节点配置
修改机器人节点配置文件,确保节点能够通过VPN连接到服务器,以下是在机器人节点配置文件中设置网络参数的示例:
roslaunch <package_name> <node_name> _master:=http://<master_ip>:11311 _hostname:=<master_ip>
<package_name>和<node_name>分别为机器人节点所在的包名和节点名。
3. 测试VPN连接
在ROS环境下,可以使用以下命令测试VPN连接:
rosrun rqt_graph rqt_graph
在rqt_graph窗口中,检查是否存在远程机器人节点,如果VPN连接成功,应能找到远程机器人节点。
通过以上步骤,我们可以在ROS环境下配置VPN连接,实现远程访问与数据传输,这有助于我们在远程环境中进行机器人实验、开发与教学,提高工作效率,希望本文对您有所帮助。
未经允许不得转载! 作者:烟雨楼,转载或复制请以超链接形式并注明出处快连vpn。
原文地址:https://le-tsvpn.com/vpnceshi/35513.html发布于:2024-11-09





还没有评论,来说两句吧...