在ROS系统下,VPN路由配置与优化策略涉及正确设置VPN连接参数,确保数据安全传输。策略包括选择合适的VPN协议、优化路由规则以减少延迟、配置NAT穿透以支持内部网络访问,以及定期更新软件和密码以增强安全性。通过这些措施,可以提升ROS系统中VPN的性能和稳定性。
ROS系统下的VPN配置

1. VPN概述
VPN技术通过公共网络构建专用网络,旨在保障数据传输的安全性,在ROS系统中,VPN主要用于实现节点间的安全通信。
2. VPN配置步骤
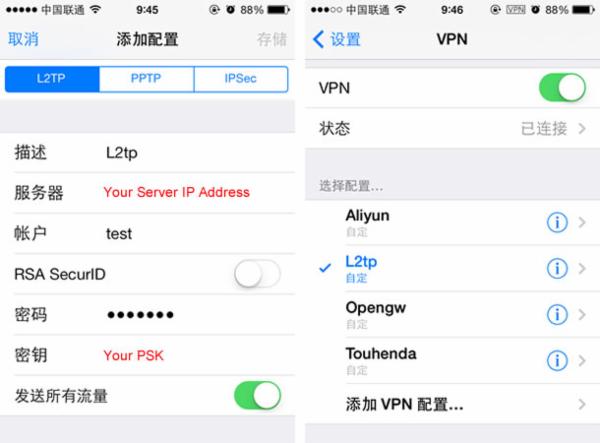
(1)选择VPN协议:目前常见的VPN协议包括PPTP、L2TP/IPsec、OpenVPN等,根据实际需求选择合适的协议。
(2)安装VPN客户端:在ROS系统中,您可以选择安装PPTP、L2TP/IPsec或OpenVPN客户端。
(3)配置VPN连接:以PPTP为例,在终端输入以下命令配置PPTP连接:
```bash
sudo pptpsetup --create <VPN服务器地址> --username <用户名> --password <密码> --encrypt
```
<VPN服务器地址>为VPN服务器IP地址,<用户名>和<密码>分别为登录VPN服务器所需的用户名和密码。
(4)连接VPN:在终端输入以下命令连接VPN:
```bash
sudo pptpconnect <VPN服务器地址>
```
(5)验证VPN连接:在终端输入以下命令查看VPN连接状态:
```bash
sudo pptpmon
```
ROS系统下的路由配置
1. 路由概述
路由是将数据包从源地址传输到目的地址的过程,在ROS系统中,正确的路由配置确保节点之间能够顺利通信。
2. 路由配置步骤
(1)查看网络接口:在终端输入以下命令查看网络接口信息:
```bash
ifconfig
```
(2)配置静态路由:以添加一条从节点A到节点B的静态路由为例,在终端输入以下命令:
```bash
sudo route add -net <节点B的IP地址段> gw <节点A的网关地址>
```
<节点B的IP地址段>为节点B的IP地址范围,<节点A的网关地址>为节点A的网关地址。
(3)验证路由配置:在终端输入以下命令测试路由配置是否成功:
```bash
ping <节点B的IP地址>
```
如果能够成功ping通节点B,则说明路由配置成功。
ROS系统下VPN路由优化策略
1. 选择合适的VPN协议
不同VPN协议在性能和安全性方面各有优劣,应根据具体需求选择合适的VPN协议,如PPTP适合简单场景,L2TP/IPsec适合安全性要求较高的场景。
2. 优化VPN连接参数
在配置VPN连接时,可以调整以下参数以提高性能:
压缩数据:启用VPN连接中的数据压缩功能,以减少数据传输量,提升传输速度。
调整MTU(Maximum Transmission Unit,最大传输单元):根据网络环境调整MTU值,以避免数据包在传输过程中分片,提高传输效率。
3. 优化路由配置
使用动态路由:动态路由能够根据网络拓扑结构自动调整路由,提升网络的可靠性。
合理配置网关:确保每个节点都有一个有效的网关地址,以便在需要时进行数据转发。
优化路由算法:选择合适的路由算法,如Dijkstra算法、A*算法等,以提高路由计算效率。
在ROS系统中,VPN和路由的配置与优化对保障数据传输的安全性和效率至关重要,通过合理配置VPN连接和路由,可以确保节点之间能够安全、高效地通信,在实际应用中,应根据需求选择合适的VPN协议、优化VPN连接参数和路由配置,以提升ROS系统的性能和稳定性。
未经允许不得转载! 作者:烟雨楼,转载或复制请以超链接形式并注明出处快连vpn。
原文地址:https://le-tsvpn.com/vpnpingce/35912.html发布于:2024-11-09






还没有评论,来说两句吧...