ROS通过配置VPN连接,实现了远程实时数据传输的解决方案。该方案利用VPN建立安全稳定的网络连接,确保数据在远程机器人系统与本地控制器之间高效、实时地传输,适用于需要远程操控和监控的机器人应用场景。

背景
ROS作为一个跨平台、模块化、可扩展的机器人开发软件框架,提供了丰富的库和工具,极大地简化了机器人各个模块之间的通信,在分布式机器人系统中,节点可能分布在全球各地,这就需要一种高效、可靠的数据传输方式来确保节点间的通信。
传统的网络通信方式,如TCP/IP、UDP等,在实现节点间通信时存在以下问题:
1、数据传输延迟较大,不适用于对实时性要求高的应用场景;
2、网络不稳定,容易导致数据丢失或错误;
3、安全性较低,易受恶意攻击。
为了解决这些问题,本文提出了一种基于VPN技术的ROS连接方案。
VPN技术简介
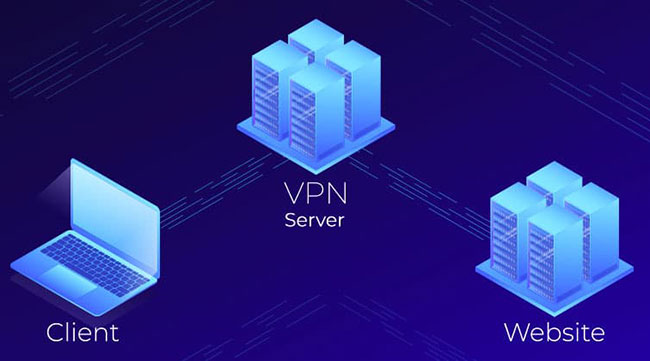
VPN(Virtual Private Network,虚拟专用网络)是一种通过公共网络(如互联网)建立安全通信的技术,它通过加密通信数据,保障数据传输的安全性;通过VPN隧道实现节点间的直接连接,降低数据传输延迟。
VPN技术主要分为以下几种类型:
1、SSL VPN:基于SSL/TLS协议的VPN,安全性高,适用于Web访问、文件传输等场景;
2、IPsec VPN:基于IPsec协议的VPN,安全性高,适用于IP层通信;
3、PPTP VPN:基于PPTP协议的VPN,配置简单,但安全性相对较低。
ROS连接VPN方案
1、选择VPN类型
根据实际需求,选择合适的VPN类型,本文以IPsec VPN为例进行介绍。
2、配置VPN服务器
在VPN服务器上安装IPsec VPN软件,如strongSwan、OpenVPN等,以下以strongSwan为例进行介绍:
(1)安装strongSwan:
```bash
sudo apt-get install strongswan
```
(2)配置strongSwan:
编辑/etc/strongswan/strongswan.conf文件,添加以下内容:
```bash
config setup
charondebug="ike 2, knl 2, cfg 2, net 2, esp 2, dmn 2, cri 2"
charon {
...
}
```
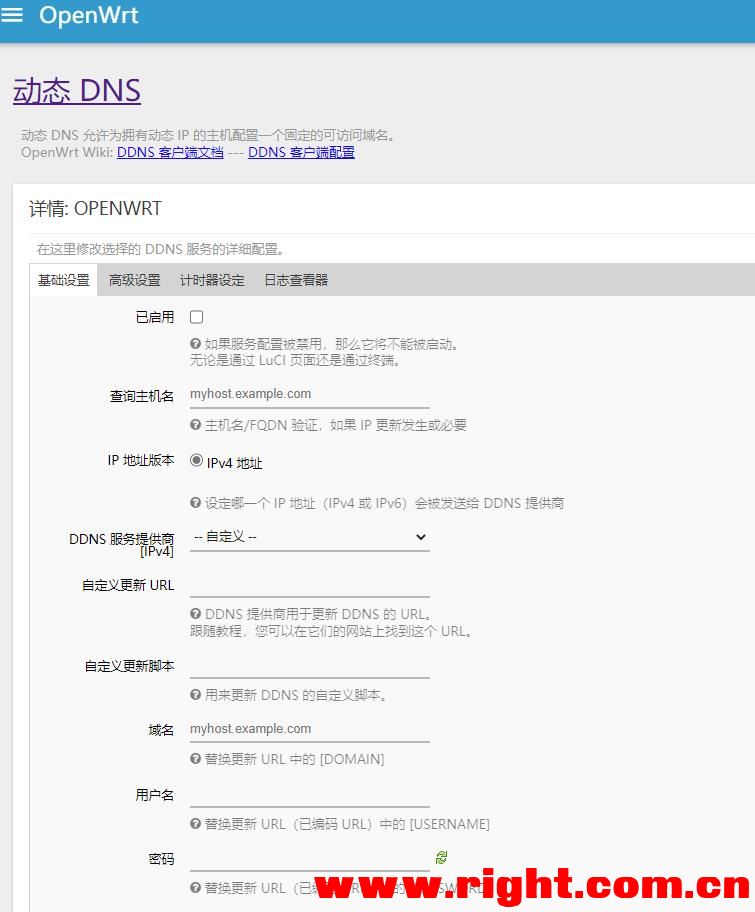
(3)配置ROS节点间的VPN连接
在ROS节点上配置VPN连接,实现节点间的远程实时数据传输。
通过以上步骤,您就可以轻松实现ROS节点间的远程实时数据传输,为您的机器人开发带来极大的便利。
未经允许不得转载! 作者:烟雨楼,转载或复制请以超链接形式并注明出处快连vpn。
原文地址:https://le-tsvpn.com/vpntuijian/55423.html发布于:2024-11-12





还没有评论,来说两句吧...